반도체용 로봇
GCR4280(대구경 웨이퍼 반송)4축 수평다관절형클린로봇

|
환경/사양
피반송물
| 모델 명 | GCR4280 |
|---|
| 사용유체 | 크린룸 대기 |
|---|
| 암 | 싱글 암 |
|---|
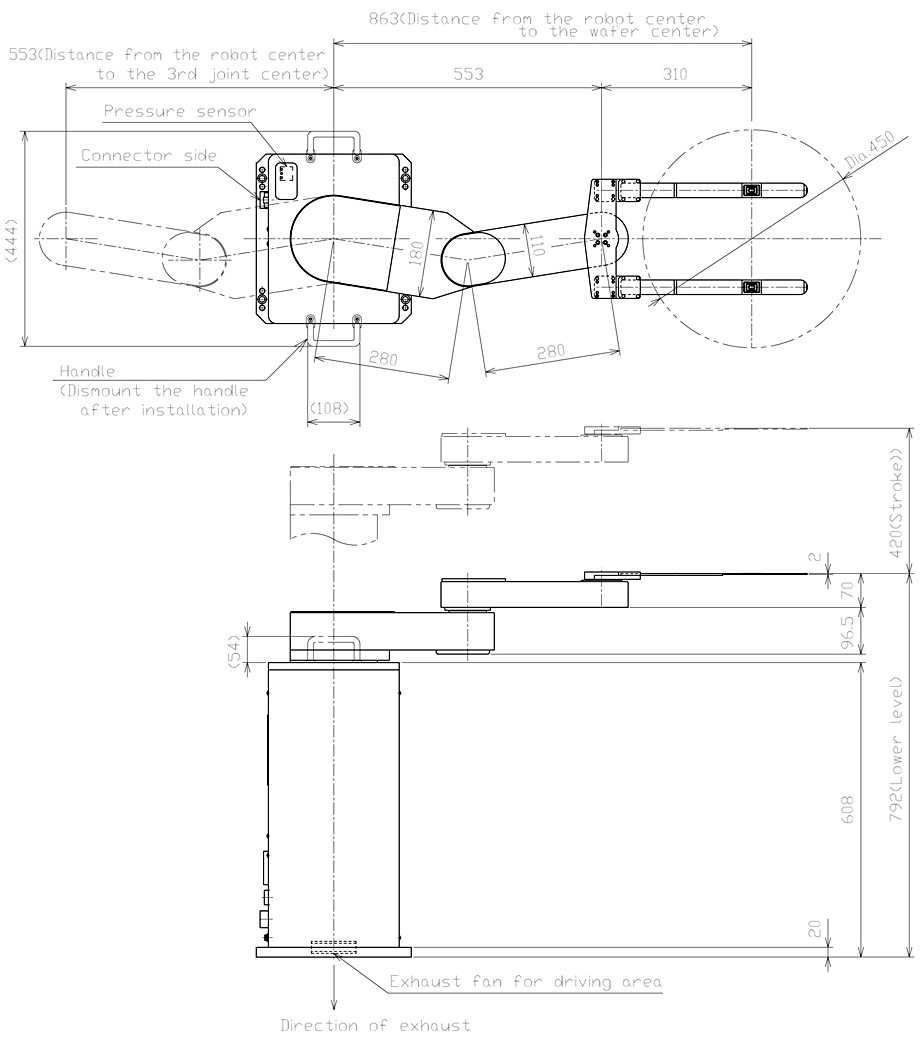
| 도달거리 | 553mm ( 제 3관절 중심거리) |
|---|
| 승강 거리 | 300mm / 420mm |
|---|
| 가반 질량 | 4kg (제 3관절 환산) |
|---|
|
제품형식 리스트
| JEL 표준 |
GCR4280-300-AM |
300mm |
|
GCR4280-420-AM |
420mm |
데모
표준사양
슈퍼클린룸용 다축 타이프, 4축 수평다관절형 클린로봇GCR4280-AM 시리즈
대구경 웨이퍼 (300mm, 450mm)대응 반도체 제조 장치 내부나 검사 장치 등의 웨이퍼 반송에 적합합니다.
- 암 동작 범위:280mm
- 로봇만으로 3FOUP 대응 가능(300mm웨이퍼)
- 클린 대책 : 진공 라인에 0.1µm 메시필터를 설치
- 장치 레이아웃에 맞추어 베이스 타이프과 플랜지 타이프에서 선택 가능
- 더블 척 사양도 선택 가능
- 동작 모니터 장비
- 제어 방식 : RS232C 및 병렬 포트 I/O
- 전축 AC 서보 모터 사용
- S자 가감속 제어로 웨이퍼를 고속, 고정밀도로 반송
- 웨이퍼 유지: 진공 흡착, 패시브 에지, 에지 그립 척
- 척 재질은 CFRP, 알루미늄, 세라믹 등 각종 재질 사용 가능
- 피반송물, 장치 레이아웃에 가장 알맞은 척으로 대응 가능
표준사양
본 사양은 당사 표준 척(흡착 타입) 장착시의 사양의 일례입니다
| 로봇형식 |
GCR4280-300-AM |
| 피반송물 |
~450mm웨이퍼, 소형유리기반 |
| 웨이퍼 유지 |
진공흡착 |
| 기계구조 형식 |
수평다관절형 |
제어축 |
4축 |
| 모터 타입 |
전 축 AC서보모터 |
| 동작 범위 |
제품 중심 도달거리 |
선회(θ축) |
상하(Z축) |
| 863mm |
335deg |
300mm |
| 반송 속도(평균) |
제(R축) |
선회(θ축) |
상하(Z축) |
| 900mm/sec |
250deg/sec |
300mm/sec |
| 반송 속도(최고) |
제(R축) |
선회(θ축) |
상하(Z축) |
| 1300mm/sec |
350deg/sec |
450mm/sec |
| 분해능 |
제(R축) |
선회(θ축) |
상하(Z축) |
| 0.0018deg |
0.0015deg |
1.96µm |
| 반송 레벨 |
669mm(베이스 설치면에서 척의 반송면까지) |
| 반복 정밀도 |
±0.1mm 이내 |
| 클린도 |
ISO Class 2 (구동부 배기시) |
| 유틸리티 |
유틸리티:1상 AC200V±10% 2kVA 진공: -53kPa 이상 (흡착 척) |
| 콘트롤러 형식 |
C5000S |
| 인터페이스 |
RS232C 및 병렬 포트 I/O |
제품 일람