반도체용 로봇
GTVCR53305축 수평다관절형 진공 대응 클린로봇
|
환경/사양피반송물
|
제품형식 리스트
| 제품형식 & 승강 거리 | |||
|---|---|---|---|
| GTVCR5330-060-AM | 60mm | ||
데모
- 사진과 데모은 GTVCR5330-060-AM(※사진과 동영상의 로봇은 4매용 척을 사용하고 있습니다.)
제품특징
5축 진공 수평다관절형 클린로봇 GTVCR5000 시리즈
진공 환경하의 병렬 배치된 챔버 스테이지에 반송이 가능
다채로운 장치의 레이아웃에 대응
풋프린트 소형화, 진공 챔버 용적의 소형화에 기여
체임버 가공의 심플 형상화에 의한 가공 비용 삭감이 가능
레이아웃의 인라인화에 최적
- 암 동작 범위: 280mm, 330mm
- 암 관절부에는 자성 유체 실 사용
- 진공 실: 자성 유체 실 및 벨로스 사용
- 클린 대책: 진공 라인에 5µm 메시필터를
- 설치트윈 척 채용으로 웨이퍼 교환 시간 단축
- 동작 모니터 장비
- 제어 방식: RS232C 및 병렬 포트 I/O
- 전 축 Absolute Encorder내장 AC서보 모터 사용
- S자 가감속 제어로 웨이퍼를 고속, 고정밀도로 반송
- 웨이퍼 유지: 패시브, 자중 그립 척, 오링에 의한 마찰 유지
- 척 재질은 CFRP, 알루미늄, 세라믹 등 각종 재질 사용 가능
- 피반송물, 장치 레이아웃에 가장 알맞은 척으로 대응 가능
표준사양
| 로봇 사양 | |||
|---|---|---|---|
| 제품형식 | GTVCR5330-060-AM | ||
| 피반송물 | ~300mm 웨이퍼 | ||
| 기계구조 형식 | 수평다관절형 | 제어축 | 5축 |
| 모터 타입 | 전축 AC 서보 모터 사용 | ||
| 동작 범위 | 제 제3관절 중심거리 | 선회 (θ축) | 상하 (Z축) |
| 635mm | 360deg | 60mm | |
| 반송 속도(평균) | 암 (R축) | 선회 (θ축) | 상하 (Z축) |
| 640mm/sec | 160deg/sec | 60mm/sec | |
| 반송 속도(최고) | 암 (R축) | 선회 (θ축) | 상하 (Z축) |
| 950mm/sec | 200deg/sec | 85mm/sec | |
| 분해능 | 제1관절축(J1축) 제2관절축(J2축) |
제3관절축(J3축) 제3관절축(J5축) |
Z축(J4축) |
| 0.00081deg 0.00081deg |
0.00072deg 0.00072deg |
0.98µm | |
| 반송 레벨 | 219mm(플랜지 설치면에서 척 설치면까지) | ||
| 반복 정밀도 | ±0.1mm 이내 | ||
| 클린도 | 자성 유체 실 및 필터에 의한 대책 | ||
| 내진공도 | 1×10-6Pa | ||
| 유틸리티 | 전원:단상AC200~230V 2kVA 50/60Hz | ||
| 콘트롤러 사양 | |||
| 콘트롤러 형식 | C5000S 시리즈 | ||
| 인터페이스 | RS232C 및 병렬 포트 I/O | ||
| 외관(표준사양) |
|---|
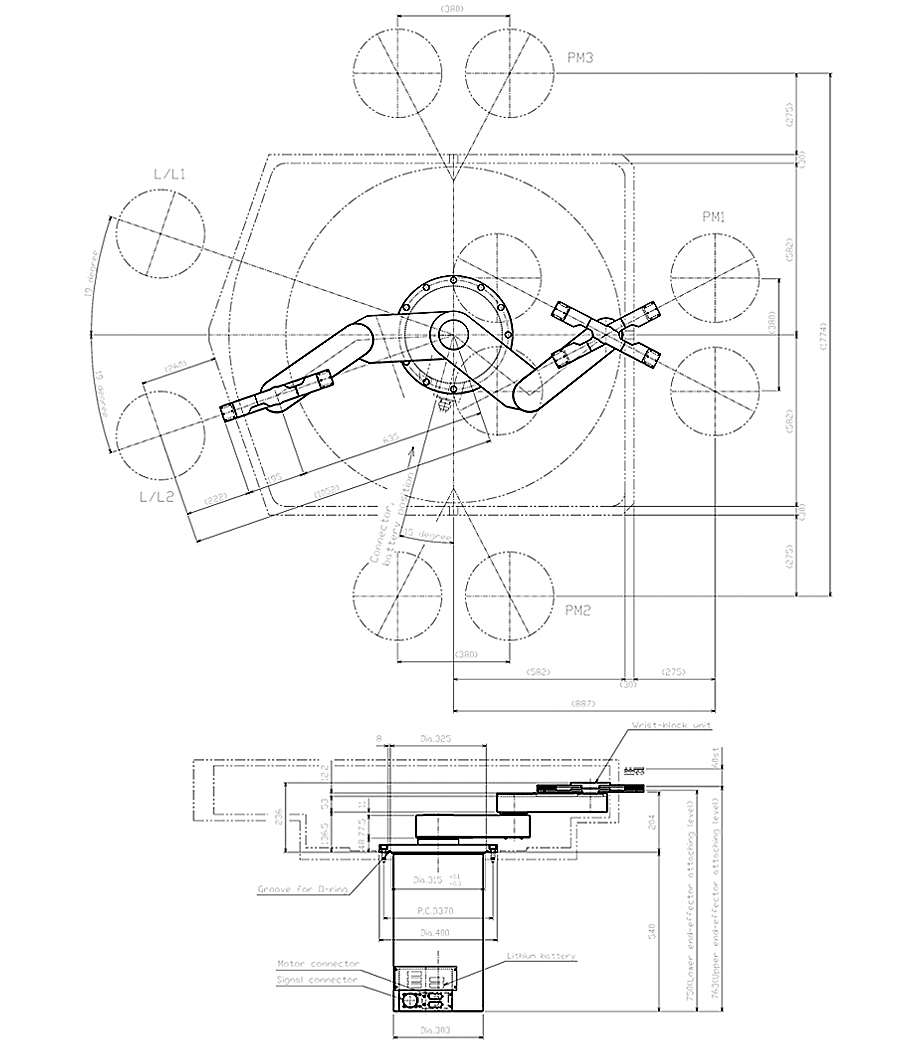
|
가이드
- ...대기
- ...진공
- ...방수
- ...싱글 암
- ...트윈 암
- ...얇은 웨이퍼
- ...CE 마킹
- ...JEL표준
- ...KCs 마킹