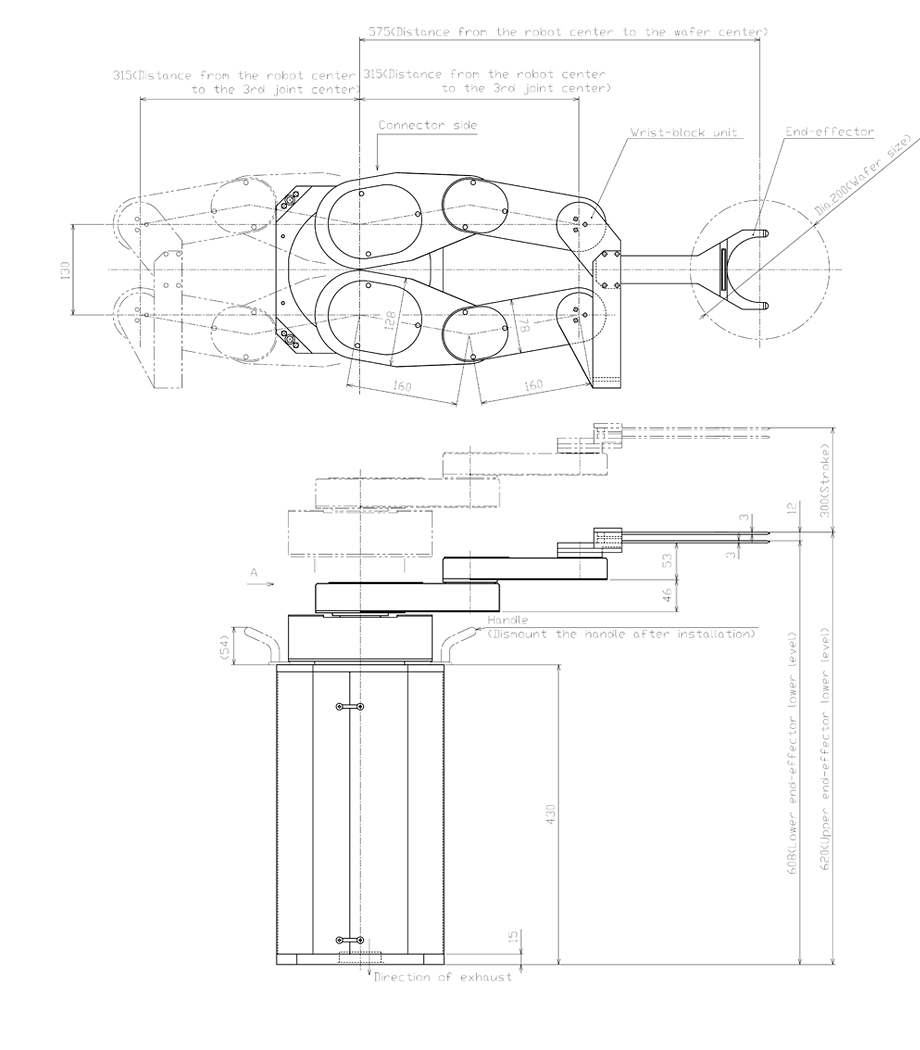
사진은 STCR4160SN-300-CM입니다. 데모은 STCR4160SN-300-PM 입니다.
제품특징
크로즈드 루프 제어 사양의 로봇에게, 유사다축 사양 (Path planning of closed-loop control) 을 라인업 하였습니다.
주행축 없이 병렬 배치된 챔버 스테이지에 반송할 수 있어 레이아웃의 자유도가 높고, 비용절감에 기여합니다.
*유사다축 사양의 반송 동영상은 여기를 참조 하십시오.
슈퍼 크린룸용 4축원통 좌표형 크린 로봇.
저가격, 고속 반송, 탈조레스를 실현했다〜300 mm웨이퍼 대응 신형 트윈 암 로봇.
급격한 부하 변동이나 급가속에서도 탈조하지 않는 Closed-loop 제어를 채용해, 로봇의 신뢰성을 더욱 향상
Absolute Encoder를 탑재하고 있는 것으로, 현재의 위치를 파악, 원점복귀 후 동작에 걸리는 시간을 단축