워크 검색 동작 순서와 트러블슈팅
7: Setting of the stop position of wafer-search completion (WEND setting)
- *WEND command may not be used depending on specifications
-
Set the stop position of wafer-search completion.
Set the stop position of wafer-search completion via serial communication.
Input the following commands for configuration: -








- (When the robot is $1, the commands are: $1WEND ****)
- Input the pulse number that is required to move to the stop position in "DEC".
 Obtain the current designated data
Obtain the current designated data
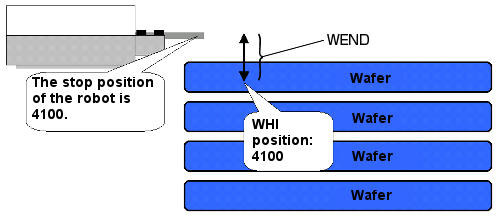
Data to be set- The stop position of wafer-search completion is the position where the robot stops at the position of “2: Setting of the highest slot in the cassette (WHI setting)" + "Stop position of wafer-search completion" when wafer-search is completed.
- Example) “WHI = 4000” setting:
- Given the “WEND = 100” setting, the stop position when wafer-search is completed is 4100.
- Note 1: When WEND value is too large, the robot may interfere with cassettes.
- Note 2: When WEND value is too small, it may fall within the range of “6: Setting of the detection gate width of wafer (WWG setting)” and it may cause an error in wafer detection of the highest slot.

[an error occurred while processing this directive]